L’Alfonce Gateway est une plateforme logicielle d’interconnexion et d’automatisation des drones, charges utiles et système d’information.
Mutli-drones et multi-utilisateurs, elle est totalement agnostique en terme de technologie et peut donc s’adapter aux drones de toutes les marques.
De nombreux algorithmes sont déjà implémentés, nous pouvons aussi entièrement personnaliser la solutions pour vos besoins jusqu’aux interfaces graphiques
Les fonctionnalités
Plus de 60000 lignes de code sont disponibles !
Analyse d'image
- Duplication du flux vidéo – traitement et pilotage
- IA (TensorFlow, Apache MXNet, PyTorch, ONNX Runtime)
- Algorithmique (OpenCV, BoofCV)
- QR Code, barcodes
- Plaques d’immatriculation
- Cibles (AruCo, AprilTag)
- Retour JSON détection
- Calculs de positionnement relatif des détections
- Géo-référencement des détections
Les missions
- Déclencheur sur évènement
- Gestion de multi mission avec gestion de priorité et failsafe
- Hauteur fixée ou calculée
- Atterrissage de précision sur cible sur véhicule en mouvement
- Trajectoire temps réel type pure poursuite ou navigation proportionnelle
- Génération de missions en temps réel avec des chemins complexes en 3D avec génération de patterns (survey, corridor, sprirale…)
- Calcul de chemin le plus court (Greedy, AStar [A*])
- Évitement d’obstacles
- Géo-caging et géo-fencing avancés, y compris en mode relatif au déplacement
- Scénarisation du Follow mode
- Suivi visuel de cible
Divers
- Connexions fournisseurs données : NTRIP (GNSS RTK), A-DSB, AIS
- Interfaces sortie de données en HTTP/JSON
- Connexions UDP, TCP, Série
- Joysticks : gamepad ou virtuels
- Gestion automatique des zones réglementaires des restrictions de vol, y compris la détection automatique du pays de décollage
Les cas d'usages
Derrière ces cas d’usages très différents se cache l’Aflonce Gateway

Le drone DRONVOR
Notre Dronvor est un drone totalement automatisé destiné à la course au large.
De la scénarisation complète du plan en mode suivi à l’atterrissage automatique par décodage visuel.
Des fonctionnalités automatiques sont implémentés pour gérer les cas de fail safe et de crash. Une partie est implémentée directement sur le drone afin de gérer les cas potentiels de perte de connexion. Les autres sont implémentés sur une passerelle présente sur le bateau.
Cliquez ici pour en savoir plus sur le Dronvor

Challenge CoHoMa
l’Alfonce Gateway est aussi au cœur de notre solution pour notre participation au challenge CoHoMa depuis la première édition, grâce notamment au développement d’IHM spécifiques de type Battle Management Système (BMS).
Elle permet d’assurer :
– La détection et le géo-référencement automatique des cubes ;
– la lecture des QR-Codes
– la programmation de missions automatiques en mode Waypoint, corridor ou pattern;
– le pilotage des drones via un gamepad (type PS4 ou XBox);
– l’assistance aux Rover terrestres via le suivi des drones aériens.
Cas d’usage illustrés
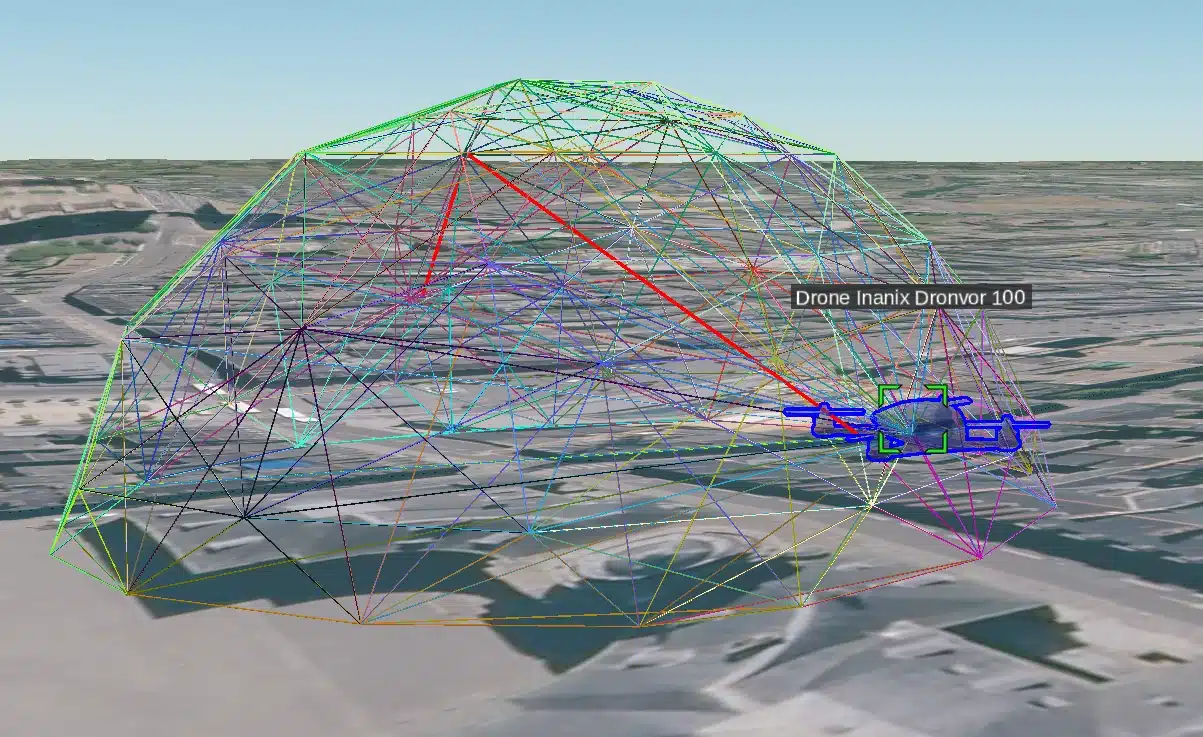
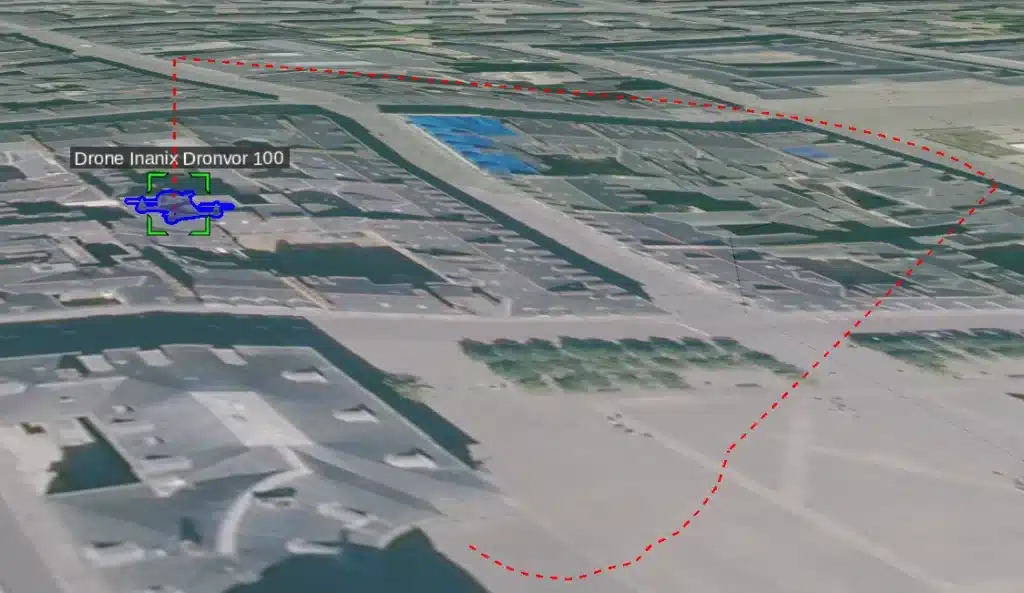
 Interface 3D avec génération multi-path en temps réel d'une mission incluant l'évitement d'obstacles
Interface 3D avec génération multi-path en temps réel d'une mission incluant l'évitement d'obstacles







